S7-300和S7-400的梯形圖(LAD)編程供S7程序員、操作員以及維護(hù)/維修人員使用。S7-300和S7-400的梯形圖(LAD)編程需要編程人員具有自動化技術(shù)的常規(guī)知識、具有計算機(jī)應(yīng)用能力和其它類似于PC(例如,編程設(shè)備)的、使用MS Windows 2000專業(yè)版或MS Windows XP專業(yè)版操作系統(tǒng)的工作設(shè)備的知識和熟悉S7程序理論,這樣才能輕松進(jìn)行西門子S7-300和S7-400編程,完成各種要求的工業(yè)自動化控制。
1.1 位邏輯指令概述
位邏輯指令使用1和0兩個數(shù)字。這兩個數(shù)字組成了名為二進(jìn)制數(shù)字系統(tǒng)基礎(chǔ)。將1和0兩個數(shù)字稱作二進(jìn)制數(shù)字或位。在觸點和線圈領(lǐng)域中,1表示激活或激勵狀態(tài),0表示未激活或未激勵狀態(tài)。
位邏輯指令對1和0信號狀態(tài)加以解釋,并按照布爾邏輯組合它們。這些組合會產(chǎn)生由1或0組成的結(jié)果,稱作“邏輯運算結(jié)果”(RLO)。
由位邏輯指令觸發(fā)的邏輯運算可以執(zhí)行各種功能。可以執(zhí)行下列功能的位邏輯指令:
·---| |--- 常開觸點(地址)
·---(SAVE) 將RLO的狀態(tài)保存到BR
·---|/|--- 常閉觸點(地址)
·XOR 邏輯“異或”
·—( ) 輸出線圈
·---(#)--- 中間輸出
·---|NOT|--- 能流取反
RLO為1時將觸發(fā)下列指令:
·---(S) 置位線圈
·---(R) 重置線圈
·SR 復(fù)位優(yōu)先型SR雙穩(wěn)態(tài)觸發(fā)器
·RS 置位優(yōu)先型RS雙穩(wěn)態(tài)觸發(fā)器
其它指令將對上升沿或下降沿過渡做出反應(yīng),執(zhí)行下列功能:
·---( N )--- RLO負(fù)跳沿檢測
·---( P )--- RLO正跳沿檢測
·NEG 地址下降沿檢測
·POS 地址上升沿檢測
·立即讀取
·立即寫入
1.2 ---| |--- 常開觸點(地址)
符號:<address>
---| |---
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D、T、C |
選中的位 |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | X | X | X | 1 |
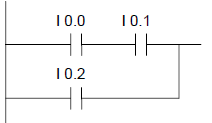
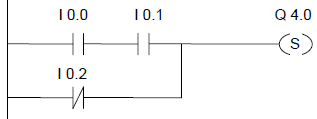
滿足下列條件之一時,將會通過能流:①輸入端I0.0和I0.1的信號狀態(tài)為“1”時;②或輸入端I0.2的信號狀態(tài)為“1”時1
1.3 ---|/|--- 常閉觸點(地址)
符號:<address>
---|/|---
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D、T、C | 選中的位 |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | X | X | X | 1 |
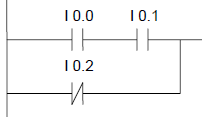
滿足下列條件之一時,將會通過能流:①輸入端I0.0和I0.1的信號狀態(tài)為“1”時;②或輸入端I0.2的信號狀態(tài)為“1”時。
1.4 XOR 邏輯“異或”
對于XOR函數(shù),必須按以下所示創(chuàng)建由常開觸點和常閉觸點組成的程序段。
符號:
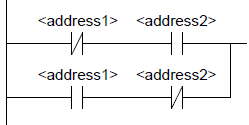
說明:XOR(邏輯“異或”)如果兩個指定位的信號狀態(tài)不同,則創(chuàng)建狀態(tài)為“1”的RLO。
實例:
如果(I0.0=“0”且I0.1=“1”)或者(I0.0=“1”且I0.1=“0”),輸出Q4.0將是“1”。
1.5 --|NOT|-- 能流取反
符號:---|NOT|---
說明:---|NOT|--- (能流取反)取反RLO位。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | - | 1 | X | - |
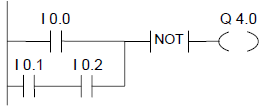
滿足下列條件之一時,輸出端Q4.0的信號狀態(tài)將是“0”:①輸入端I0.0的信號狀態(tài)為“1”時;②或當(dāng)輸入端I0.1和I0.2的信號狀態(tài)為“1”時。
1.6 ---( ) 輸出線圈
符號:<address>
---( )
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D |
分配位 |
MCR (主控繼電器)依存關(guān)系
只有在將輸出線圈置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存關(guān)系。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài)并且輸出線圈有能流通過,將把尋址位設(shè)置為能流的當(dāng)前狀態(tài)。如果MCR處于斷開狀態(tài),則無論能流狀態(tài)如何,都會將邏輯“0”寫入指定地址。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | - | 0 |
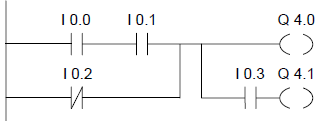
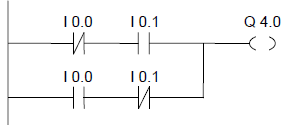
滿足下列條件之一時,輸出端Q4.0的信號狀態(tài)將是“1”:
①輸入端I0.0和I0.1的信號狀態(tài)為“1”時
②或輸入端I0.2的信號狀態(tài)為“0”時。
滿足下列條件之一時,輸出端Q4.1的信號狀態(tài)將是“1”:
①輸入端I0.0和I0.1的信號狀態(tài)為“1”時
②或輸入端I0.2的信號狀態(tài)為“0”、輸入端I0.3的信號狀態(tài)為“1”時
如果實例梯級在激活的MCR區(qū)之內(nèi):
①MCR處于接通狀態(tài)時,將按照上述能流狀態(tài)置位Q4.0和Q4.1。
②MCR處于斷開狀態(tài)(=0)時,無論是否有能流通過,都將Q4.0和Q4.1復(fù)位為0。
1.7 ---(#)--- 中間輸出
符號:<address>
---(#)---
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、*L、D | 分配位 |
說明:---(#)--- (中間輸出)是中間分配單元,它將RLO位狀態(tài)(能流狀態(tài))保存到指定<地址>。中間輸出單元保存前面分支單元的邏輯結(jié)果。以串聯(lián)方式與其它觸點連接時,可以像插入觸點那樣插入---(#)---不能將---(#)---單元連接到電源軌道、直接連接在分支連接的后面或連接在分支的尾部。使用---|NOT|---(能流取反)單元可以創(chuàng)建取反---(#)---。
MCR (主控繼電器)依存關(guān)系
只有在將中間輸出線圈置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存關(guān)系。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài)并且中間輸出線圈有能流通過,將把尋址位設(shè)置為能流的當(dāng)前狀態(tài)。如果MCR處于斷開狀態(tài),則無論能流狀態(tài)如何,都會將邏輯“0”寫入指定地址。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | - | 1 |
實例:

1.8 ---(R) 復(fù)位線圈
符號:<address>
---(R)
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D、T、C | 復(fù)位 |
MCR (主控繼電器)依存關(guān)系
只有將復(fù)位線圈置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài)并且復(fù)位線圈有能流通過,將把尋址位狀態(tài)復(fù)位為“0”。如果MCR處于斷開狀態(tài),則無論能流狀態(tài)如何,單元指定地址的當(dāng)前狀態(tài)均保持不變。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | - | 0 |
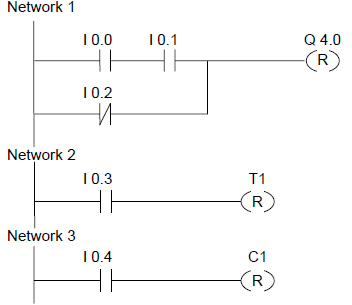
滿足下列條件之一時,將把輸出端Q4.0的信號狀態(tài)復(fù)位為“0”:
①輸入端I0.0和I0.1的信號狀態(tài)為“1”時
②或輸入端I0.2的信號狀態(tài)為“0”時。
③如果RLO為“0”,輸出端Q4.0的信號狀態(tài)將保持不變。
滿足下列條件時才會復(fù)位定時器T1的信號狀態(tài):輸入端I0.3的信號狀態(tài)為“1”時。
滿足下列條件時才會復(fù)位計數(shù)器C1的信號狀態(tài):輸入端I0.4的信號狀態(tài)為“1”時。
如果實例梯級在激活的MCR區(qū)之內(nèi):
①MCR處于接通狀態(tài)時,將按以上所述復(fù)位Q4.0、T1和C1。
②MCR處于斷開狀態(tài)時,無論RLO的狀態(tài)(能流狀態(tài))如何,Q4.0、T1和C1的狀態(tài)均保持不變。
1.9 ---(S) 置位線圈
符號:<address>
---(S)
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D | 置位 |
MCR (主控繼電器)依存關(guān)系
只有將置位線圈置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存關(guān)系。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài)并且置位線圈有能流通過,將把尋址位的狀態(tài)置位為“1”。如果MCR處于斷開狀態(tài),則無論能流狀態(tài)如何,單元指定地址的當(dāng)前狀態(tài)均保持不變。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | - | 0 |
滿足下列條件之一時,輸出端Q4.0的信號狀態(tài)將是“1”:①輸入端I0.0和I0.1的信號狀態(tài)為“1”時;②或輸入端I0.2的信號狀態(tài)為“0”時。
如果RLO為“0”,輸出端Q4.0的信號狀態(tài)將保持不變。
如果實例梯級在激活的MCR區(qū)之內(nèi):
MCR處于接通狀態(tài)時,則按以上所述置位Q4.0。
MCR處于斷開狀態(tài)時,無論RLO狀態(tài)(能流狀態(tài))如何,Q4.0狀態(tài)均保持不變。
1.10 RS 置位優(yōu)先型RS雙穩(wěn)態(tài)觸發(fā)器
符號:
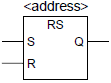
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D | 置位或復(fù)位 |
| S | BOOL | I、Q、M、L、D | 啟用復(fù)位指令 |
| R | BOOL | I、Q、M、L、D | 啟用復(fù)位指令 |
| Q | BOOL | I、Q、M、L、D | <地址>的信號狀態(tài) |
則置位觸發(fā)器。如果兩個輸入端的RLO均為“1”,則指令的執(zhí)行順序是最重要的。
RS觸發(fā)器先在指定<地址>執(zhí)行復(fù)位指令,然后執(zhí)行置位指令,以使該地址在執(zhí)行余下的程序掃描過程中保持置位狀態(tài)。
只有在RLO為“1”時,才會執(zhí)行S(置位)和R(復(fù)位)指令。這些指令不受RLO“0”的影響,指令中指定的地址保持不變。
MCR (主控繼電器)依存關(guān)系
只有將RS觸發(fā)器置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存關(guān)系。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài),則按以上所述將尋址位復(fù)位為“0”或置位為“1”。如果MCR處于關(guān)閉狀態(tài),則無論輸入狀態(tài)如何,指定地址的當(dāng)前狀態(tài)均保持不變。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | X | X | X | 1 |
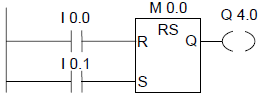
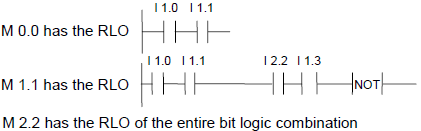
如果輸入端I0.0的信號狀態(tài)為“1”,I0.1的信號狀態(tài)為“0”,則置位存儲器位M0.0,輸出Q4.0將是“0”。否則,如果輸入端I0.0的信號狀態(tài)為“0”,I0.1的信號狀態(tài)為“1”,則復(fù)位存儲器位M0.0,輸出Q4.0將是“1”。如果兩個信號狀態(tài)均為“0”,則不會發(fā)生任何變化。如果兩個信號狀態(tài)均為“1”,將因順序關(guān)系執(zhí)行置位指令;置位M0.0,Q4.0將是“1”。
如果實例在激活的MCR區(qū)之內(nèi):
MCR處于打開狀態(tài)時,將按以上所述復(fù)位或置位Q4.0;MCR處于關(guān)閉狀態(tài)時,無論輸入狀態(tài)如何,Q4.0均保持不變。
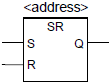
1.11 SR 復(fù)位優(yōu)先型SR雙穩(wěn)態(tài)觸發(fā)器
符號:
說明:如果SR的S輸入端的信號狀態(tài)為“1”,R輸入端的信號狀態(tài)為“0”,則置位SR(復(fù)位優(yōu)先型SR雙穩(wěn)態(tài)觸發(fā)器)。否則,如果S輸入端的信號狀態(tài)為“0”,R輸入端的信號狀態(tài)為“1”,則復(fù)位觸發(fā)器。如果兩個輸入端的RLO均為“1”,則指令的執(zhí)行順序是最重要的。SR觸發(fā)器先在指定<地址>執(zhí)行置位指令,然后執(zhí)行復(fù)位指令,以使該地址在執(zhí)行余下的程序掃描過程中保持復(fù)位狀態(tài)。只有在RLO為“1”時,才會執(zhí)行S(置位)和R(復(fù)位)指令。這些指令不受RLO“0”的影響,指令中指定的地址保持不變。
MCR (主控繼電器)依存關(guān)系
只有將SR觸發(fā)器置于激活的MCR區(qū)內(nèi)時,才會激活MCR依存關(guān)系。在激活的MCR區(qū)內(nèi),如果MCR處于接通狀態(tài),則按以上所述將尋址位置位為“1”或復(fù)位為“0”。如果MCR處于關(guān)閉狀態(tài),則無論輸入狀態(tài)如何,指定地址的當(dāng)前狀態(tài)均保持不變。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | X | X | X | 1 |
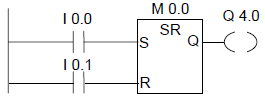
如果輸入端I0.0的信號狀態(tài)為“1”,I0.1的信號狀態(tài)為“0”,則置位存儲器位M0.0,輸出Q4.0將是“1”。否則,如果輸入端I0.0的信號狀態(tài)為“0”,I0.1的信號狀態(tài)為“1”,則復(fù)位存儲器位M0.0,輸出Q4.0將是“0”。如果兩個信號狀態(tài)均為“0”,則不會發(fā)生任何變化。如果兩個信號狀態(tài)均為“1”,將因順序關(guān)系執(zhí)行復(fù)位指令;復(fù)位M0.0,Q4.0將是“0”。
如果實例在激活的MCR區(qū)之內(nèi):
MCR處于打開狀態(tài)時,將按以上所述置位或復(fù)位Q4.0;MCR處于關(guān)閉狀態(tài)時,無論輸入狀態(tài)如何,Q4.0均保持不變。
1.12 ---(N)--- RLO負(fù)跳沿檢測
符號:<address>
---(N)
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D | 邊沿存儲位,存儲RLO的上一信號狀態(tài) |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | X | 1 |
實例:
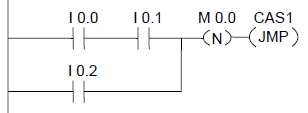
邊沿存儲位M0.0保存RLO的先前狀態(tài)。RLO的信號狀態(tài)從“1”變?yōu)椤?”時,程序?qū)⑻D(zhuǎn)到標(biāo)號CAS1。
1.13 ---(P)--- RLO正跳沿檢測
符號:<address>
---(P)---
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address> | BOOL | I、Q、M、L、D | 邊沿存儲位,存儲RLO的上一信號狀態(tài) |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | - | - | - | - | - | 0 | X | X | 1 |
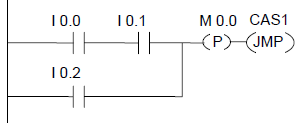
邊沿存儲位M0.0保存RLO的先前狀態(tài)。RLO的信號狀態(tài)從“0”變?yōu)椤?”時,程序?qū)⑻D(zhuǎn)到標(biāo)號CAS1。
1.14 ---(SAVE) 將RLO狀態(tài)保存到BR
符號:---(SAVE)
說明:---(SAVE)(將RLO狀態(tài)保存到BR)將RLO保存到狀態(tài)字的BR位。未復(fù)位第一個校驗位/FC。因此,BR位的狀態(tài)將包含在下一程序段的AND邏輯運算中。
指令“SAVE”(LAD、FBD、STL)適用下列規(guī)則,手冊及在線幫助中提供的建議用法并不適用:
建議用戶不要在使用SAVE后在同一塊或從屬塊中校驗BR位,因為這期間執(zhí)行的指令中有許多會對BR位進(jìn)行修改。建議用戶在退出塊前使用SAVE指令,因為ENO輸出(= BR位)屆時已設(shè)置為RLO位的值,所以可以檢查塊中是否有錯誤。
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | X | - | - | - | - | - | - | - | - |
實例:
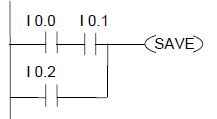
將梯級(=RLO)的狀態(tài)保存到BR位。
1.15 NEG 地址下降沿檢測
符號
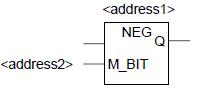
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address1> | BOOL | I、Q、M、L、D | 已掃描信號 |
| <address2> | BOOL | I、Q、M、L、D | M_BIT邊沿存儲位,存儲<address1>的前一個信號狀態(tài) |
| Q | BOOL | I、Q、M、L、D | 單觸發(fā)輸出 |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | X | - | - | - | - | X | 1 | X | 1 |
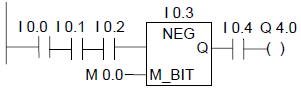
滿足下列條件時,輸出Q4.0的信號狀態(tài)將是“1”:
·輸入I0.0、I0.1和I0.2的信號狀態(tài)是“1”
·輸入I0.3有下降沿
·輸入I0.4的信號狀態(tài)為“1”
1.16 POS 地址上升沿檢測
符號:
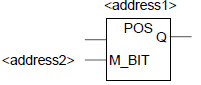
| 參數(shù) | 數(shù)據(jù)類型 | 內(nèi)存區(qū)域 | 說明 |
| <address1> | BOOL | I、Q、M、L、D | 已掃描信號 |
| <address2> | BOOL | I、Q、M、L、D | M_BIT邊沿存儲位,存儲<address1>的前一個信號狀態(tài) |
| Q | BOOL | I、Q、M、L、D | 單觸發(fā)輸出 |
狀態(tài)字:
| BR | CC 1 | CC 0 | OV | OS | OR | STA | RLO | /FC | |
| 寫: | X | - | - | - | - | X | 1 | X | 1 |
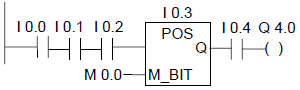
滿足下列條件時,輸出Q4.0的信號狀態(tài)將是“1”:
·輸入I0.0、I0.1和I0.2的信號狀態(tài)是“1”
·輸入I0.3有上升沿
·輸入I0.4的信號狀態(tài)為“1”
1.17 立即讀取
說明:對于“立即讀取”功能,必須按以下實例所示創(chuàng)建符號程序段。
對于對時間要求苛刻的應(yīng)用程序,對數(shù)字輸入的當(dāng)前狀態(tài)的讀取可能要比正常情況下每OB1掃描周期一次的速度快。“立即讀取”在掃描“立即讀取”梯級時從輸入模塊中獲取數(shù)字輸入的狀態(tài)。否則,必須等到下一OB1掃描周期結(jié)束,屆時將以P存儲器狀態(tài)更新I存儲區(qū)。
要從輸入模塊立即讀取一個輸入(或多個輸入),請使用外設(shè)輸入(PI)存儲區(qū)來代替輸入(I)存儲區(qū)。可以字節(jié)、字或雙字形式讀取外設(shè)輸入存儲區(qū)。因此,不能通過觸點(位)元素讀取單一數(shù)字輸入。
根據(jù)立即輸入的狀態(tài)有條件地傳遞電壓:
①CPU讀取包含相關(guān)輸入數(shù)據(jù)的PI存儲器的字。
②如果輸入位處于接通狀態(tài)(為“1”),將對PI存儲器的字與某個常數(shù)執(zhí)行產(chǎn)生非零結(jié)果的AND運算。
③測試?yán)奂悠鞯姆橇銞l件。
實例:可以立即讀取外設(shè)輸入I1.1的梯形圖程序段
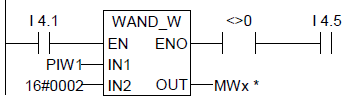
必須指定*MWx,才能存儲程序段。x可以是允許的任何數(shù)。
WAND_W指令說明:
PIW1 0000000000101010
W#16#0002 0000000000000010
結(jié)果 0000000000000010
在此實例中,立即輸入I1.1與I4.1和I4.5串聯(lián)。
字PIW1包含I1.1的立即狀態(tài)。對PIW1與W#16#0002執(zhí)行AND運算。如果PB1中的I1.1(第二位)為真(“1”),則結(jié)果不等于零。如果WAND_W指令的結(jié)果不等于零,觸點A<>0時將傳遞電壓。
1.18 立即寫入
說明:對于“立即寫入”功能,必須按以下實例所示創(chuàng)建符號程序段。
對于對時間要求苛刻的應(yīng)用程序,將數(shù)字輸出的當(dāng)前狀態(tài)發(fā)送給輸出模塊的速度可能必須快于正常情況下在OB1掃描周期結(jié)束時發(fā)送一次的速度。“立即寫入”將在掃描“立即寫入”梯級時將數(shù)字輸出寫入輸入模塊。否則,必須等到下一OB1掃描周期結(jié)束,屆時將以P存儲器狀態(tài)更新Q存儲區(qū)。
要將一個輸出(或多個輸出)立即寫入輸出模塊,請使用外設(shè)輸出(PQ)存儲區(qū)來代替輸出(Q)存儲區(qū)。可以字節(jié)、字或雙字形式讀取外設(shè)輸出存儲區(qū)。因此,不能通過線圈單元更新單一數(shù)字輸出。要立即向輸出模塊寫入數(shù)字輸出的狀態(tài),將根據(jù)條件把包含相關(guān)位的Q存儲器的字節(jié)、字或雙字復(fù)制到相應(yīng)的PQ存儲器(直接輸出模塊地址)中。
當(dāng)心
·由于Q存儲器的整個字節(jié)都寫入了輸出模塊,因此在執(zhí)行立即輸出時,將更新該字節(jié)中的所有輸出位。
·如果輸出位在程序各處產(chǎn)生了多個中間狀態(tài)(1/0),而這些狀態(tài)不應(yīng)發(fā)送給輸出模塊,則執(zhí)行“立即寫入”可能會導(dǎo)致危險情況(輸出端產(chǎn)生瞬態(tài)脈沖)發(fā)生。
·作為常規(guī)設(shè)計原則,在程序中只能以線圈形式對外部輸出模塊引用一次。如果用戶遵循此設(shè)計原則,則可以避免使用立即輸出時的大多數(shù)潛在問題。
實例
立即寫入外設(shè)數(shù)字輸出模塊5通道1的等價梯形圖程序段。
可以修改尋址輸出Q字節(jié)(QB5)的狀態(tài)位,也可以將其保持不變。程序段1中給Q5.1分配I0.1信號狀態(tài)。將QB5復(fù)制到相應(yīng)的直接外設(shè)輸出存儲區(qū)(PQB5)。
字PIW1包含I1.1的立即狀態(tài)。對PIW1與W#16#0002執(zhí)行AND運算。如果PB1中的I1.1(第二位)為真(“1”),則結(jié)果不等于零。如果WAND_W指令的結(jié)果不等于零,觸點A<>0時將傳遞電壓。
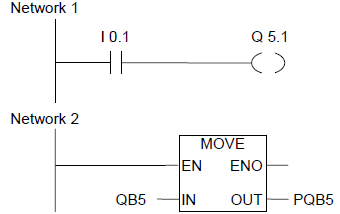
在此實例中,Q5.1為所需的立即輸出位;字節(jié)PQB5包含Q5.1位的立即輸出狀態(tài);MOVE(復(fù)制)指令還會更新PQB5的其它7位。
學(xué)習(xí)PLC編程是一個枯燥和需要堅持的過程,您讀完這篇文章,請用您的耐心將下面文章全部讀完并動手操作,不久的將來一個西門PLC編程高手將在不斷實踐和應(yīng)用中誕生!!






